Electronics Weekly
Electronics Weekly
Gecko feet have already done something similar for out-of-water robots, where hairs that split and split again deliver a huge surface area where van der Waals forces can add up to something useful for the surface of grippers or artificial feet.
However, the gecko scheme cannot work underwater.
The Seoul researchers sought something with high adhesion hysteresis to keep it stuck without outside influence, but that would unstick quickly when required.
This took them to the underside of starfish, where hundreds of soft miniature legs terminate in sucker-like feet that can be sucked temporarily onto surfaces.
In the real thing, animal-controlled water pressure inside the leg acts on a diaphragm at the bottom to close and open the sucker-like foot.
“Starfish, a type of echinoderm, can move on rocks, adhere to rough surface, and toss sand grains,” said SeoulTech biomolecular engineer Professor Hyunsik Yoon.
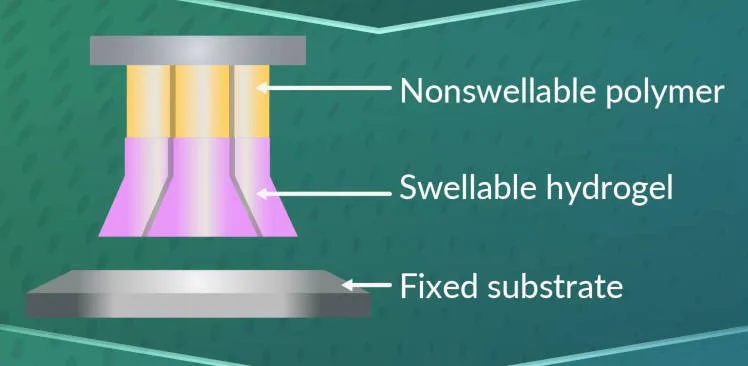
The starfish-inspired artificial foot is made from two tubular cylindrical parts formed end-on-end (top diagram). There is no diaphragm at the bottom.
One is a rigid stem, while the other is a soft hydrogel that forms a dimple and then a cup in its free end – a soft end that stretches and spreads out when it contacts a surface.
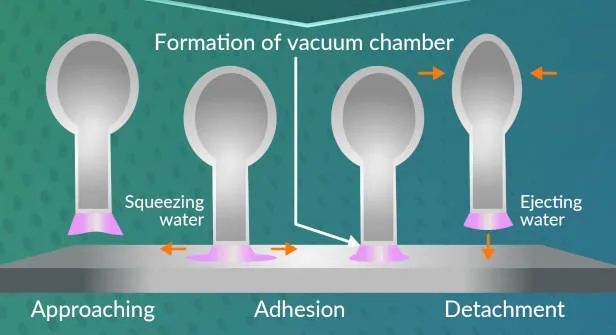
“Eventually, this transformation facilitates the desirable adhesion of the foot to target surfaces,” according to SeoulTech. “Notably, the formation of a vacuum within the tube during detachment results in a strong underwater adhesion force as high as 65kPa.”
The added length of the rigid section allows detachment through mechanical angling the leg sideways, or fluid pressure can be applied though the hollow stem to release it.
Underwater manipulation of small rocks was used to demonstrate the feet in action.
“Its controllable grip could enable chip transfer in micro-LED production,” said Yoon. “In healthcare, the same reversible, glue-free adhesion could lead to biomedical patches, wearable sensors and surgical tools that attach securely to wet skin or tissue.”
Read more about the research in ‘Starfish-inspired tube feet for temporary and switchable underwater adhesion and transportation‘, published in Science Advances.
Last year, the Max Planck ETH Center for Learning Systems revealed a nimble electro-hydraulic muscle for robot legs.