 Electronics Weekly
Electronics Weekly
These trends place growing demands on interconnect design, as connectors must deliver stable electrical performance while accommodating motion, vibration, assembly tolerance and long-term mechanical stress within confined spaces.
Unlike conventional industrial robots, cobots typically employ lightweight mechanical structures, integrated joint modules and compact control cabinets. Interconnects are therefore often located in mechanically dynamic or space-constrained areas, where connector performance directly affects system reliability, service life and maintainability. As a result, designers increasingly assess interconnects based on functional interface requirements rather than relying on a single connector category across the entire system.
Floating Board-to-Board Interconnects in Control Cabinets
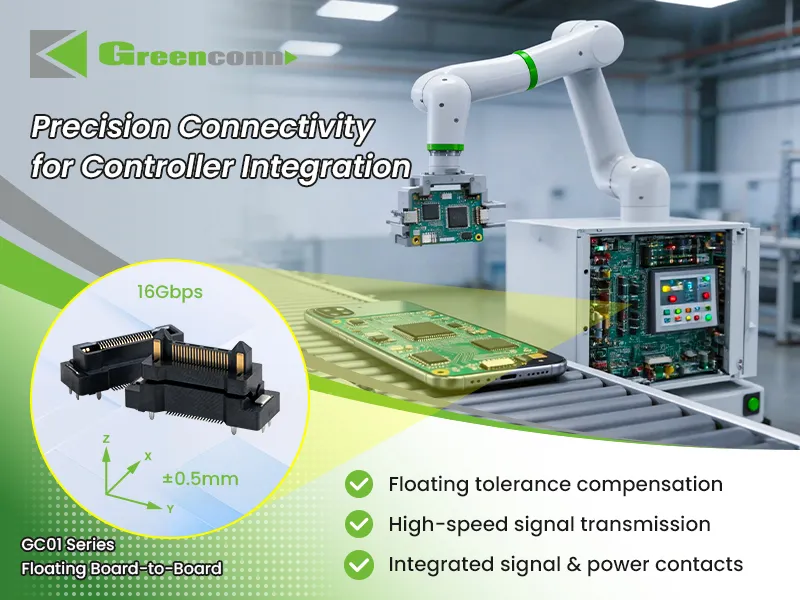
Within robotic control cabinets, PCB misalignment caused by assembly variation, thermal expansion or mechanical loading can place stress on rigid board-to-board interfaces, potentially affecting both signal integrity and current-carrying capability.
The GC01 series floating connectors from Greenconn incorporate defined float ranges and compliant contact structures that allow limited positional movement between mating PCBs. Designed to support high-speed data rates up to 16 Gbps alongside integrated power and signal contacts, these interconnects absorb mechanical stress while maintaining stable electrical performance, enabling reliable and serviceable integration in compact controller assemblies.
Compact Wire-to-Board Interconnects in Articulated Joints
Articulated joints are among the most demanding interconnect environments in collaborative robots. Dense PCB layouts, limited routing clearance and continuous movement require compact interconnects capable of maintaining stable electrical contact under vibration and repeated articulation.
Low-profile wire-to-board interconnects are widely used in joint-level signal and low-power interfaces due to their fine pitch and efficient PCB utilisation. Greenconn’s GB01 series wafer connectors are designed with controlled contact force and reinforced housing structures, supporting stable electrical continuity for sensor feedback, control signals and localized power interfaces within articulated robotic assemblies.

Sealed Wire-to-Wire Connectivity for Peripheral Interfaces
Collaborative robots often incorporate peripheral interfaces exposed to dust, moisture, vibration or routine cleaning processes, particularly in logistics, medical and light industrial environments. These interfaces require connectivity that remains stable under both environmental and mechanical stress.
Greenconn’s GT series waterproof connectors are applied to protect power and signal paths from environmental ingress, with sealing performance rated up to IP68 and current-carrying capability up to 13 A, while maintaining robust wire retention and vibration resistance. Such designs support reliable connectivity across a broad range of robotic peripheral applications, including auxiliary modules, tooling connections and distributed power links.

As robotic systems continue to evolve toward higher integration, modular construction and diverse operating environments, interconnect strategies must remain flexible and adaptable. Drawing on experience in precision interconnect design and manufacturing, Greenconn develops a broad portfolio of interconnect products addressing electrical performance, mechanical robustness and integration flexibility. These capabilities support reliable connectivity not only in collaborative robots, but also across a wider range of robotic and automation systems with evolving architectural and environmental requirements.
Author information
![]()
Website: https://www.greenconn.com
Contact: sales@greenconn.com



